




Support CANFD communication protocols
11 degrees of freedom
6 active degrees of freedom
Sensorless
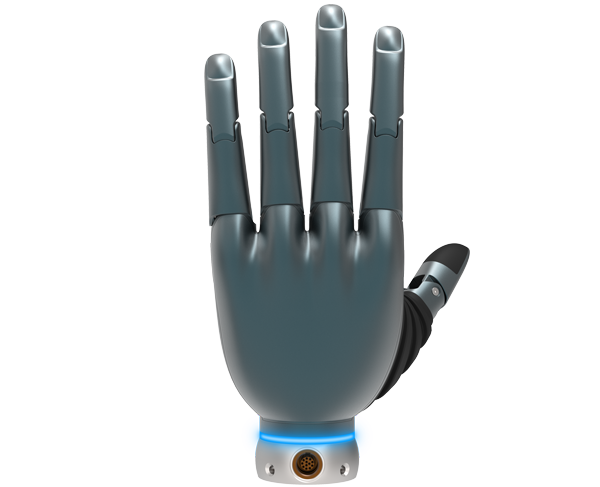
The DH116 series five-fingered dexterous hand is the second-generation mass-produced version of the five-fingered dexterous hand. The DH116 series dexterous hand is driven by a brushless coreless motor and adopts a worm gear and worm drive scheme, with a total of 11 degrees of freedom, weighing 545g. It can be configured with fingertip and palm tactile sensors, capable of perceiving multi-dimensional force tactile information such as normal force, tangential force, and tangential force direction.
DH116 series dexterous hands have the characteristics of " two highs, two strengths and one light ":
High-speed communication
Standard with 100MHz EtherCAT communication, enabling 100-fold accelerated real-time haptic feedback and motion control. It also supports CANFD/RS485 and other conventional communication protocols.
High reliability
Equipped with a brushless coreless servo motor, FOC current loop, and force-position hybrid control algorithm, it comes standard with 6 tactile sensors, has proximity sensing and soft landing capabilities, and achieves a grasping lifespan of 1 million cycles.
Powerful load capacity
The maximum load capacity of the entire hand can reach 30kG , the maximum load capacity of a single finger is 5kG , the lateral grip strength exceeds 50N , and it can easily handle handling scenarios.
Powerful perception ability
Standard configuration MultiModal Machine Learning tactile sensor, enabling accurate perception of multi-dimensional data information of objects.
Lightweight
545g±10g standard sensor