16 active (brushless coreless motors) + 5 passive degrees of freedom
The communication protocols supported include CAN (1M), CANFD (1M + 5M), RS485 (5M)
The maximum grip force of the whole hand is 94N
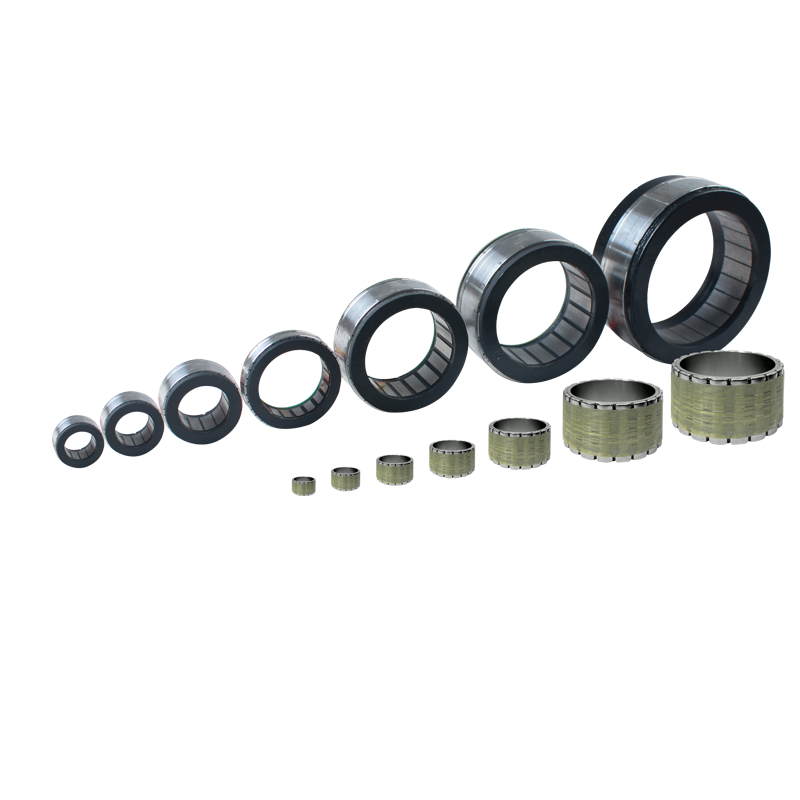
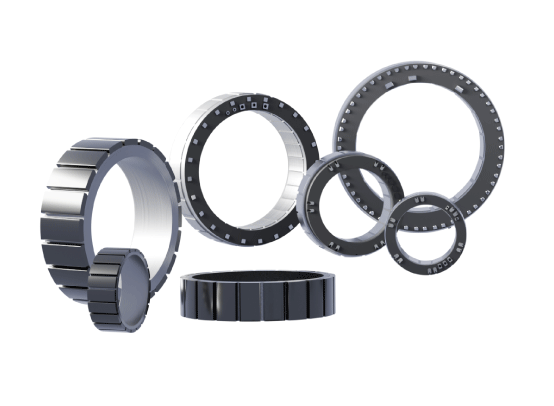
Screw drive structure
Support operating systems such as Windows, Linux, and ROS2, support development environments under x86 and ARM, support development languages like C++ and Python
Provide highly visual and user - friendly upper - computer debugging tools, as well as open - source SDKs and DEMOs
Companion Series
No Companion Series
Similar Series
No Similar Series
Notice:
Description of naming method of part number, Description of naming method of part number.
This website uses cookies. By clicking “Accept All Cookies”, you agree to the storing of cookies on your device and to the associated processing of data to enhance site navigation, analyze site usage, and assist in our marketing and performance efforts. Privacy Policy