



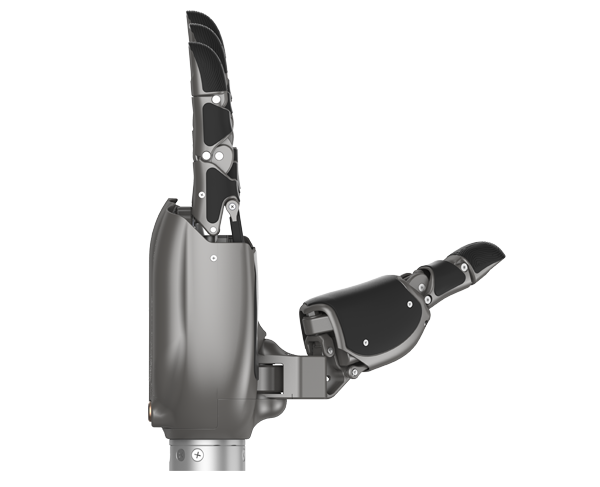
Right handedness, support RS485/CAN communication protocols
21 degrees of freedom
16 active degrees of freedom
Sensorless
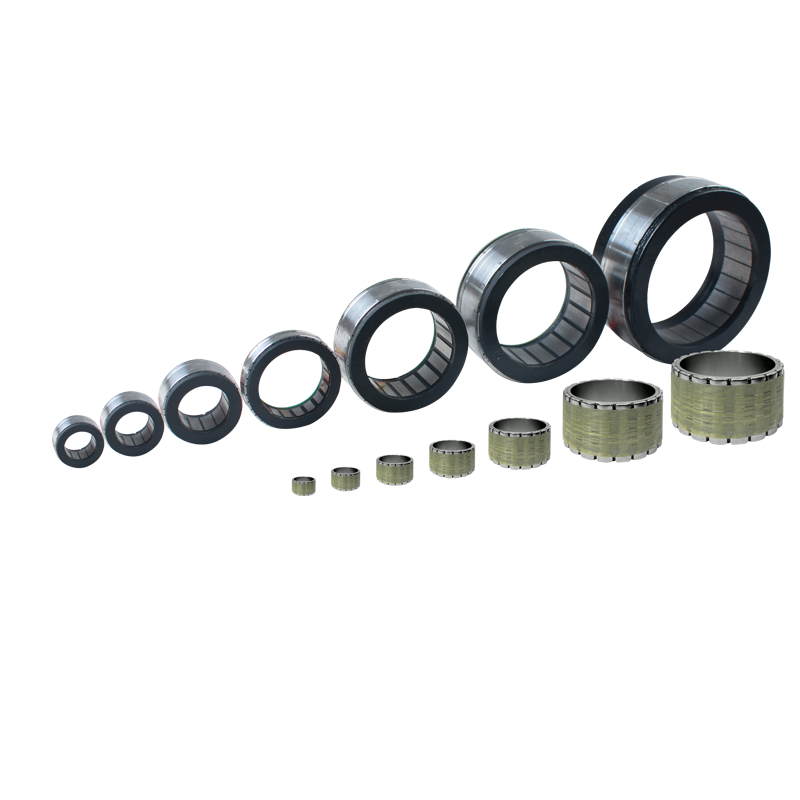
The DH2116 series dexterous hand is a high-degree-of-freedom product series
The DH2116 series dexterous hand features 21 degrees of freedom with 16 active degrees of freedom, uses trapezoidal screw drive transmission, supports Windows, Linux, and ROS2 operating systems, supports development on x86 and ARM platforms, supports C++ and Python programming languages, supports CAN, CANFD, and RS485 communication protocols, provides a highly visual and interactive host PC debugging tool, and includes open-source SDK and DEMO.